| |
系统特点
1.比台式倒立摆它有更多的运动自由度
2.开放的MATLAB运动控制软件环境
3.嵌入式工业用运动控制器(PC104总线),Windows开发平台
4.在线修改控制算法,实现更多、实时性更好的自定义控制功能
5.更方便地加入附加功能(语音,视觉),扩展性强
6.提供MATLAB控制接口
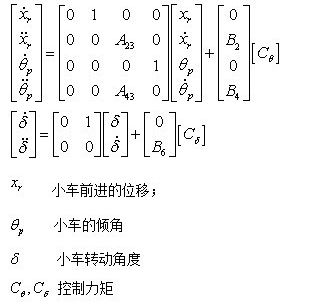
系统模型
参考实验内容
- 陀螺仪原理分析与实验
- 无线遥控原理分析与实验
- 系统建模实验分析
- 系统的开环响应特性分析
- PID控制器设计
- 极点配置控制器设计
- LQR控制器设计
- 用户自定义控制算法
MATLAB控制软件及其界面
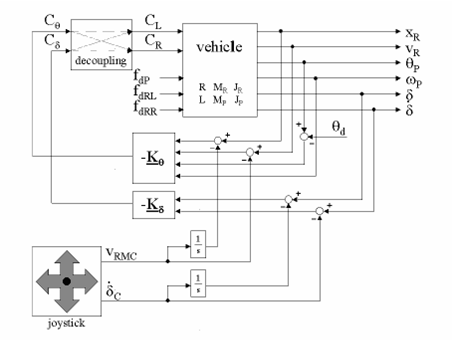
控制方框图
主要技术参数
|
长´宽´高
|
426mm´574mm´710mm
|
|
直流伺服电机功率
|
85W
|
|
电机减速比
|
10:1
|
|
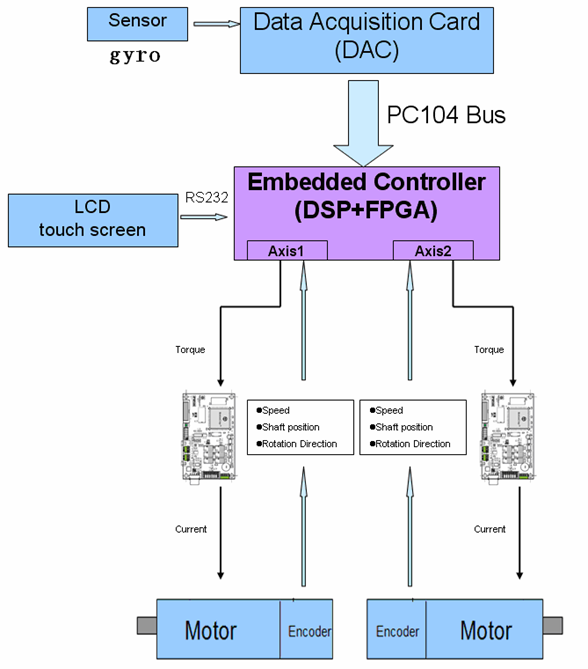
运动控制器
|
基于DSP和FPGA技术的嵌入式运动控制器
PC104总线
3轴电机控制通道
|
|
软件环境
|
MATLAB7.0
|
|
最大移动速度
|
1.6m/s
|
|
电源模块
|
镍氢电池8.5Ah(24V)
|
|
电源持续工作时长
|
>1.5小时
|
|
最大爬坡角度
|
20度
|
|
倾角计(陀螺仪)
|
供电电源 9~12V
AD/DA精度 12bits
工作电流 30mA
检测最大角速度 ±300deg/sec(25˚C)
检测角度量程(单轴) 360˚ (25˚C)
响应频率 150HZ
温度漂移 ± 0.025%/˚C
工作温度范围 -40~50˚C
模拟量输出 (0~4.096V)
重复测量精度 0.10˚
|
|
小车净重
|
20Kg
|
定购指南
|
产品编号
|
产品名称
|
产品配置
|
|
GBOT1001
|
自平衡小车
|
ABOT-MB-1001 自平衡小车本体
ABOT-CS-1001 自平衡小车控制系统
SBOT-MAT-1001 自平衡小车控制系统软件
|
控制器架构
使用对象
综合了控制类课程的主要实验项目,可满足本科,研究生教学实验,课程设计,毕业设计以及算法研究等不同层次的教学需求。
|